
NASA’s new free-flying robotic system, Astrobee, which is designed to help astronauts reduce the time they spend on routine duties, has undergone its first hardware tests on the International Space Station. During the test, it was checked whether the robot’s subsystems such as avionics, cameras, propulsion, and docking for power and data transfer, are working properly or not.
Anne McClain, NASA astronaut performed the first series of tests of an Astrobee robot- Bumble, during a hardware checkout. As you can see in the image, the docking station where the Astrobees recharge is located to her right. The station was installed in the Kibo module on the International Space Station on Feb. 15. Two of the robots, Bumble, and another one named Honey launched to the space station on Apr. 17.
And the recent test was all about to see how robots can take care of spacecraft when astronauts are away. According to NASA, ‘robots will play a significant part in the agency’s mission to return to the Moon as well as other deep space missions.’
What is the Astrobee robotic system?
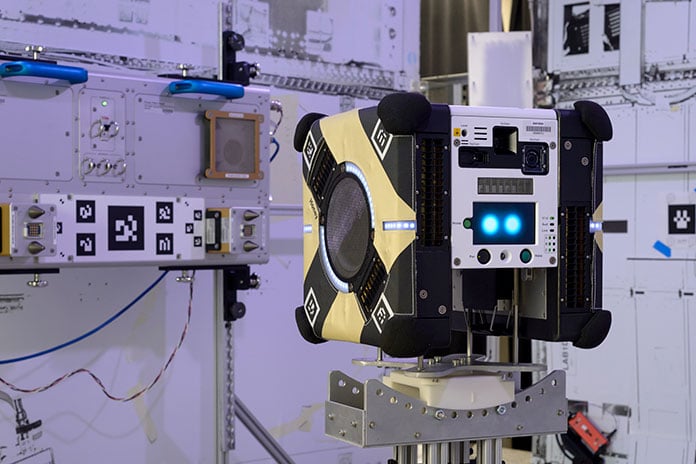
The Astrobee system actually consists of three cubed-shaped robots- named Honey, Queen, and Bumble, software and docking station used for recharging. Using electric fans as a propelled system, the robots can move freely and also able to return to their docking station on their own to recharge their batteries when required.
The robots are equipped with cameras, microphones, and other sensors to help operators on the ground to monitor conditions. The robot will be used for assistance tasks and can work either autonomously or by remote control. This will allow astronauts to concentrate on the more important tasks. And hopefully, increase astronaut productivity and help maintain spacecraft when astronauts are not present near the Moon, Mars or other deep-space outposts.
Moreover, each robot is a cube shape measuring one foot per side and is equipped with an arm which allows it to grab onto handrails around the station. In addition, the robot’s modular nature allows the operator to add more features when needed.
The system will take some time until it is completed, and more tests will be conducted before the full launch of the robots later this spring. Researchers are also planning more complex experiments, including carrying payloads, which will begin in 2020.