
Human muscles are a great example for soft robots because they can efficiently store and release energy. Unlike rigid robots that need a lot of energy to stay in one position, soft robots, inspired by human muscles, can store and release energy well. Copying the features of human muscles in soft robots can improve energy efficiency, flexibility, and adaptability, making them useful in many different situations.
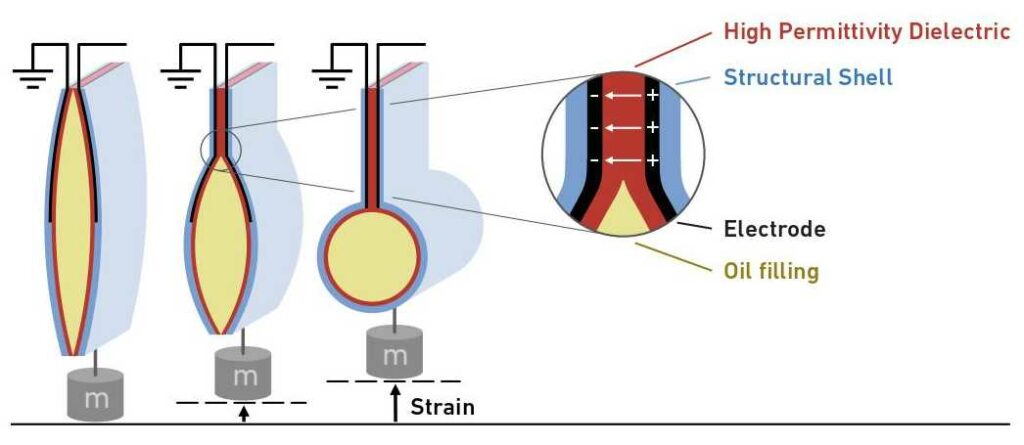
Artificial muscles work like natural muscles but are not made of cells and fibers. Instead, they have a pouch filled with liquid, usually oil. The pouch’s shell is partially covered in electrodes. When these electrodes get an electrical signal, they move closer, pushing the liquid into the pouch. This makes the pouch flex and lift a weight, similar to how a muscle works. Multiple pouches can be connected to create a whole artificial muscle or actuator.
The idea of developing artificial muscles is familiar. Still, until now, there has been a major obstacle to realizing it: electrostatic actuators worked only with extremely high voltages of around 6,000 to 10,000 volts.
Robert Katzschmann, a robotics professor at ETH Zurich, has developed a new solution with Stephan-Daniel Gravert, Elia Varini, and other colleagues. They have developed artificial muscles that are lighter, safer, and more robust than their predecessors.
The researchers created a shell for the pouch and named the new artificial muscles HALVE actuators, where HALVE stands for “hydraulically amplified low-voltage electrostatic.” In contrast to other actuators where the electrodes are on the outer shell, the newly designed shell in this study has different layers.
They used a high-permittivity ferroelectric material combined with a layer of electrodes that can store large amounts of electrical energy. This combination was then coated with a polymer shell with excellent mechanical properties, adding stability to the pouch.
Using the ferroelectric material with higher permittivity, the researchers could reduce the required voltage while still generating large forces. Gravert and Varini developed the shell for the HALVE actuators and constructed the actuators themselves in the lab for use in two robots.
One example of these robots is a gripper that is 11 centimeters tall and has two fingers. Each finger is controlled by three series-connected pouches of the HALVE actuator. The robot is powered by a small battery-operated supply that provides 900 volts. The battery and power supply together weigh only 15 grams.
The entire gripper, including the power and control electronics, weighs 45 grams. Despite its small size, the gripper can firmly grasp a smooth plastic object, supporting its own weight when lifted into the air with a cord.
Robert Katzschmann, a robotics professor at ETH Zurich, said, “This example excellently demonstrates how small, light, and efficient the HALVE actuators are. It also means that we’ve taken a huge step closer to our goal of creating integrated muscle-operated system.”
The second example is a fish-like swimmer, approximately 30 centimeters long, designed to move smoothly through the water. It comprises a “head” containing the electronics and a flexible “body” to which the HALVE actuators are attached. These actuators move alternately in a rhythm, generating the swimming motion. The autonomous fish can transition from a standstill to a speed of three centimeters per second in 14 seconds, even in regular tap water.
Katzschmann said, “The fish illustrates a general advantage of these actuators – the electrodes are protected from the environment and, conversely, the environment is protected from the electrodes. So, you can operate these electrostatic actuators in water or touch them, for example.”
“And the layered structure of the pouches has another advantage: the new actuators are much more robust than other artificial muscles.”
Gravert says, “When this happened in earlier models, the electrode would burn, creating a hole in the shell. This allowed the liquid to escape and rendered the actuator useless.”
“This problem is solved in the HALVE actuators because a single hole closes itself due to the protective plastic outer layer. As a result, the pouch usually remains fully functional even after an electrical breakdown.”
Katzschmann says, “Now we have to ready this technology for larger-scale production, and we can’t do that here in the ETH lab. Without giving too much away, I can say that we’re already registering interest from companies that would like to work with us.”
Journal Reference:
- Gravert SD, Varini E, Kazemipour A, Michelis MY, Buchner T, Hinchet R, Katzschmann RK: Low-voltage electrohydraulic actuators for untethered robotics. Science Advances, 5. Januar 2024, DOI: 10.1126/sciadv.adi9319