
In industrial settings, robots often are used for tasks that require repetitive grasping and manipulation of objects. Soft robotic grippers and actuators have attracted increasing attention due to safer and more adaptable human-machine and environment-machine interactions than their rigid counterparts.
Now, a team of engineers at Michigan State University has designed and developed a novel soft humanoid hand that is capable of robustly grasping a variety of objects with different weights, sizes, shapes, textures, and stiffnesses much in the same way humans do.
When designing the new model, the lead author Changyong Cao and his team observed several human-environment interactions, from fruit picking to sensitive medical care. By studying all the interactions, the team has developed a prototype that demonstrates the merits of a responsive, fast, lightweight gripper capable of handling a multitude of tasks that traditionally required different types of gripping systems.
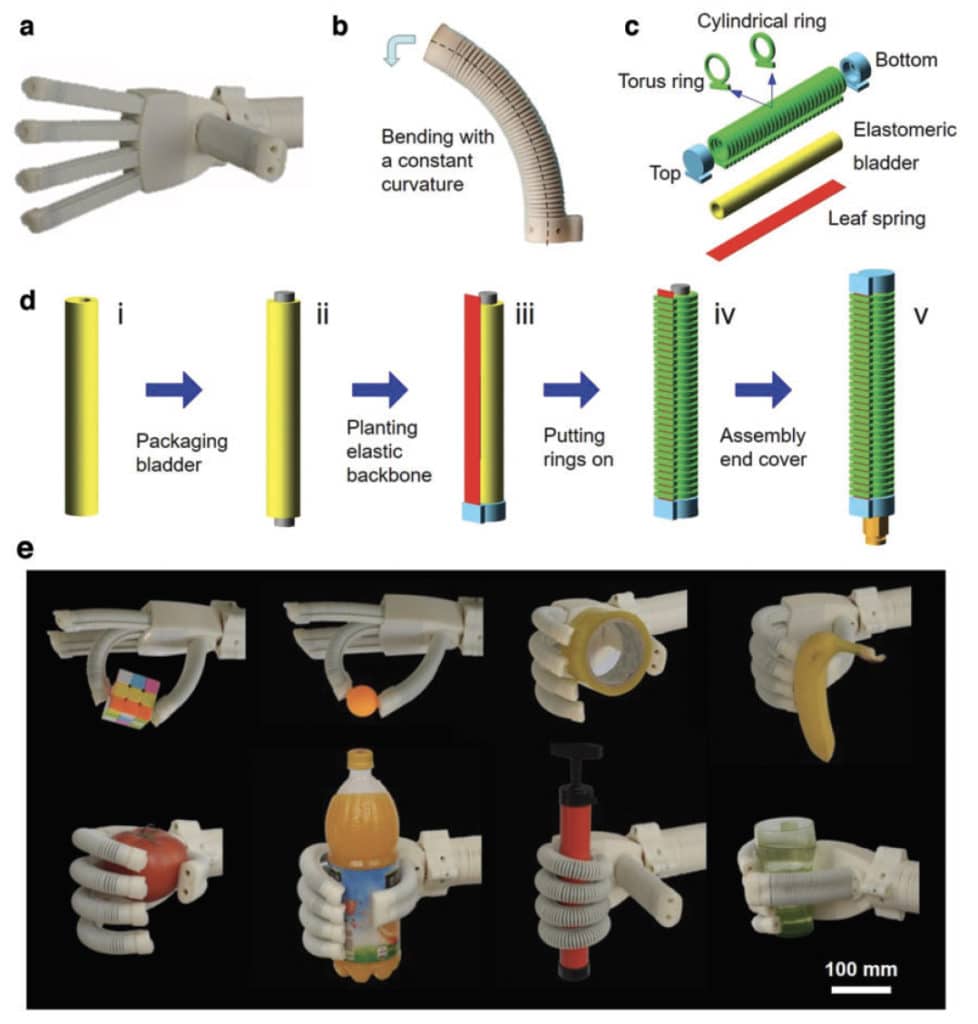
The prototype has four fingers and an opposable thumb; each soft hand finger is made of flexible hybrid pneumatic actuators (FHPAs). These actuators use pressurized air to allow each of the fingers to move independently. Inside the fingers is a bone-like spring core, which is built around a unique structural combination of the actuated air bladder. This new FHPA achieves a balance of required flexibility and necessary stiffness; thanks to this, the gripper has the capabilities of large grasping force, ease of fabrication, and repair.
“The novel humanoid hand design is a soft-hard hybrid flexible gripper. It can generate larger grasping force than a traditional pure soft hand, and simultaneously be more stable for accurate manipulation than other counterparts used for heavier objects,” said Changyong Cao.
In addition to fruit picking and medical treatment, the invention can be used, for example, in product packaging, manipulation of fragile objects, rehabilitation, and surgical robotics.
In the future work, the team hopes to combine its advances with Cao’s recent work on so-called ‘smart’ grippers, integrating printed sensors in the gripping material. They are also looking for the possibilities of combining the hybrid gripper with ‘soft arms’ models, which would allow the machine to more accurately mimic precise human actions.
Journal Reference:
- Soft Humanoid Hands with Large Grasping Force Enabled by Flexible Hybrid Pneumatic Actuators. DOI: 10.1089/soro.2020.0001