")
The European Space Agency (ESA) is sending a rover into space in 2020 to examine the surface of Mars for signs of life. This rover is equipped a high-resolution camera developed in Switzerland, and researchers from the University of Basel are currently testing its operation in an artificial Martian landscape.
The aim of the joint European/Russian mission ExoMars is to search for possible signs of present or past life on Mars. The rover’s onboard equipment will comprise the Close-Up Imager (CLUPI), a camera for taking high-resolution close-up shots in color.
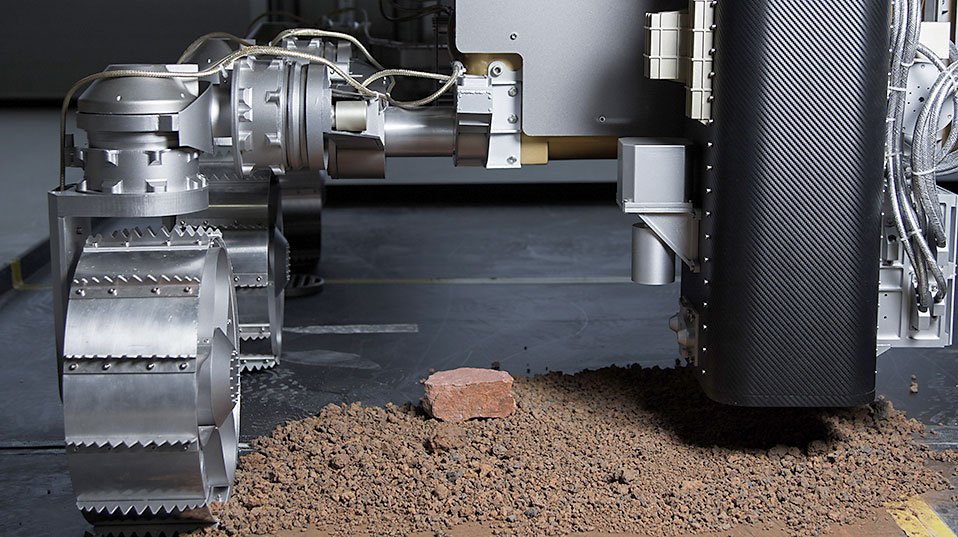
CLUPI is attached to the outside of the rover and is used as a magnifying glass, so to speak, for studying rocks and core samples.

Researchers from the University of Basel are currently simulating the camera’s operation at the Technologiezentrum Witterswil.
The geographer Nikolaus Kuhn from the University of Basel is part of the science team in charge of CLUPI. Before the camera sets off on its nine-month journey to Mars in 2020, it is undergoing intensive testing and optimization work.
Professor Nikolaus Kuhn, said while explaining the procedure, “We’re attempting to simulate operation on Mars.”
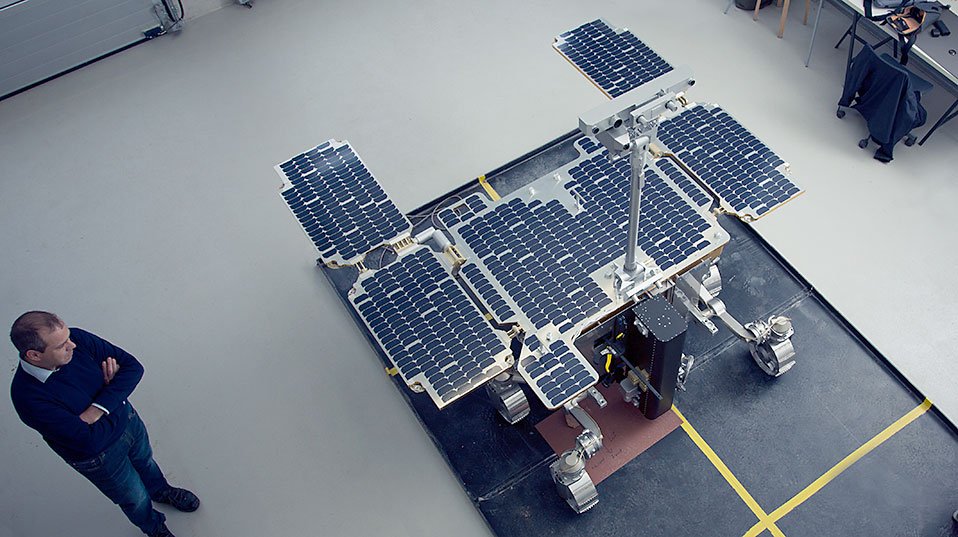
To this end, he and his team have created an artificial Martian landscape.
He added, “We call the testing ground the Martian garden – it provides a landscape closely resembling the Martian surface over an area of approximately 30 square meters.”
The team uses sediments, rocks, and appropriate light sources to simulate the rover’s working environment on Mars.
Kuhn states, “For example, these models and the Martian landscape allow us to test how the rover casts shadows, what distance CLUPI needs to be from the surface, or how long it takes to take a detailed photograph of the surface of a rock.”
Although both the rover and the camera are still only working models, the Basel-based scientists know where the camera will be installed and how it will be positioned relative to the surface.
As a member of the CLUPI science team, however, Kuhn is not only involved in the run-up to the mission. He will also be one of the first to receive and analyze the data once the rover has begun its investigations on Mars.
The geoscientist says, “Of course, this direct access to the data is extremely exciting for us – we’re at the forefront and can help to decide what the project studies.”
The mission is set to land on March 19, 2021. Until then, Kuhn and his colleagues will have to make do with the Martian garden in Witterswil.