
Soft robots can’t always compete with hard. But every year, soft robots gain new abilities – they can simplify certain mechanical tasks, such as grasping and squirming, using their inherent “material intelligence.” However, soft devices may rely on hard, electronic control systems, and entirely soft devices remain constrained in their capabilities.
To overcome this problem, researchers from Harvard’s Wyss Institute for Biologically Inspired Engineering have developed the world’s first soft ring oscillator, which gives soft robots the ability to roll, undulate, sort, meter liquids, and swallow. Earlier, these same researchers had created soft actuators and soft digital logic that replicates the same capabilities of an electronic computer – thus removing all the remaining hard components for building soft robots.
“It’s another tool in the toolkit to make these smart, soft robots without any electronics, and without any hard valves,” according to Daniel J. Preston, lead author of the study.
Conventionally, the ring oscillators are designed using electronic transistors or microfluidics – both rely on hard components to function, while the soft version replaces that hardware with inverters that manipulate air pressure.
Those inverters – “NOT” digital logic gates – manipulate the air pressure in the robot’s rubber tubes. If the input is high pressure, the output will be low pressure, and vice versa. And when three, or any odd number, of gates, are connected in a ring, one gate shift triggers the next, and so forth, giving robots new dynamic motions.
Read more: The air-powered soft robot replaces multiple control systems with one input
To test their soft robot oscillator, the team created five different soft robot prototypes, each using a constant flow of air pressure to drive three inverters. One of these prototypes pushes a ball around a ring. Another undulates a stage to keep beads of two different sizes rolling against the edge, enabling the smaller beads to fall through holes, sorting themselves.
The ring oscillator is also suitable for things like rolling motions, which requires the coordination of several actions in time. To get their hexagonal foam robot to move forward, the ring oscillator helps inflate a balloon behind the robot and deflate one in front at the same time. The coordinated push-and-release shifts the hexagon forward again and again as the balloons inflate and deflate in perfect sync.
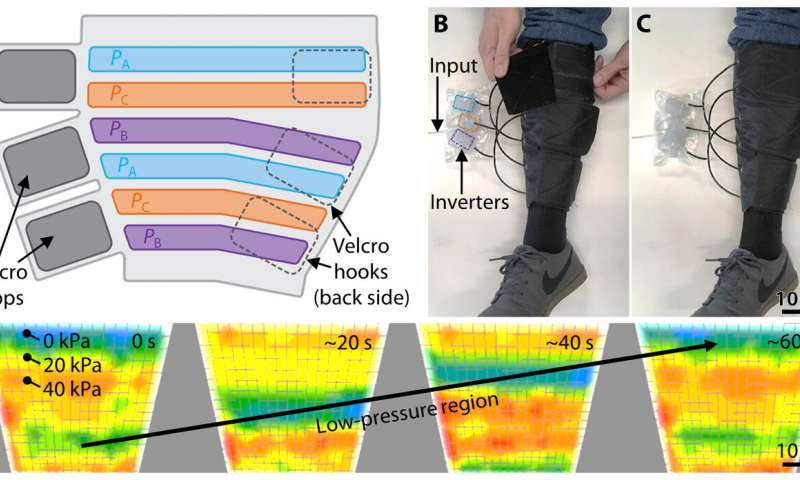
They also created a textile-based sleeve wrapped around the lower leg and secured with Velcro, which exerts coordinated pressure to pump fluid up the leg.
All the prototypes are made with soft materials and are relied on tethered air pressure. The researchers are currently looking at ways to remove that connection to let soft robots work in remote locations or hazardous areas.
“People can use the soft ring oscillator for a lot of different applications in soft robotics, some of which we may not have even thought of or envisioned yet,” Preston added.
Journal Reference
- Preston, D. J., Jiang, H. J., Sanchez, V., Rothemund, P., Rawson, J., Nemitz, M. P., Lee, K., Suo, Z., Walsh, C. J., & Whitesides, G. M. (2019). A soft ring oscillator. Science Robotics. DOI: aaw5496