
Research in robotic manipulation has focused on rigid objects more than deformable objects and granular media. One reason is due to the difficulty of modeling the complex dynamics of the latter two. Another reason is that the perceptual understanding of the latter two via tactile-based hardware devices and algorithms is poor compared to vision-based methods.
While dealing with physical interactions, the tactile sensation can be more critical than visual information. Due to these compounding limitations, robotic manipulation of deformable objects and granular media remains poorly explored.
With this motivation, MIT scientists have designed a sharp-tipped robot finger equipped with tactile sensing to meet the challenge of identifying buried objects.
They dubbed this robot- finger as Digger Finger, that can dig through granular media such as sand and rice. During experiments, it could successfully sense the shapes of submerged items it encountered.
Scientists noted, “the robot might one day perform various subterranean duties, such as finding buried cables or disarming buried bombs.”
Previously, researchers have used technologies that sense the subterranean from above, such as Ground Penetrating Radar or ultrasonic vibrations. But these techniques provide only a hazy view of submerged objects. They might struggle to differentiate rock from bone, for example.
Edward Adelson, the John and Dorothy Wilson Professor of Vision Science in CSAIL and the Department of Brain and Cognitive Sciences, said, “So, the idea is to make a finger that has a good sense of touch and can distinguish between the various things its feeling. That would be helpful if you’re trying to find and disable buried bombs, for example.”
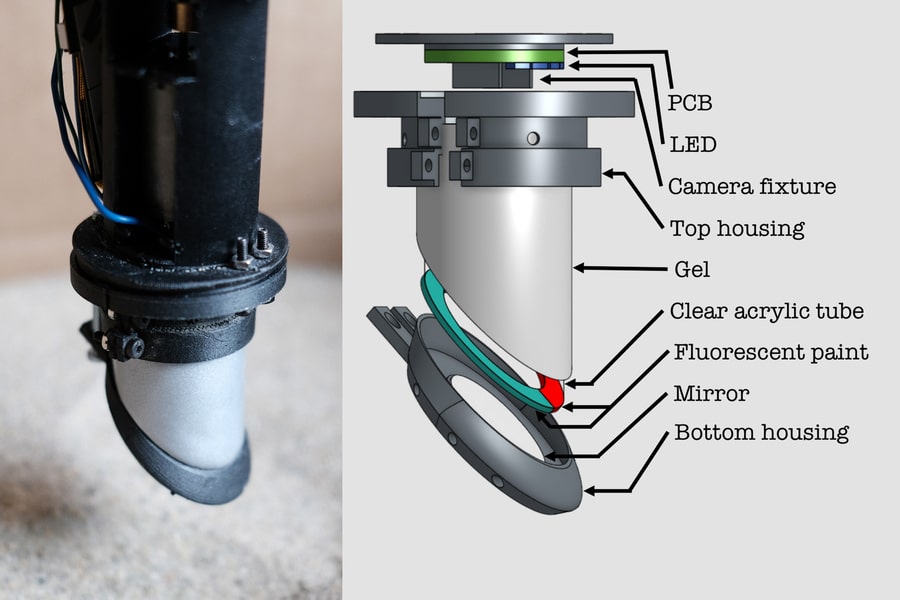
Credits:Image courtesy of the researchers
For the Digger Finger, the analysts thinned down their GelSight sensor in two main ways. In the first place, they changed the shape to be a slender cylinder with a beveled tip. Then, they dumped two-thirds of the LED lights, utilizing a combination of blue LEDs and colored fluorescent paint.
The eventual outcome highlighted a gadget whose material detecting layer was around 2 square centimeters, as the tip of a finger.
Scientists later focused on motion with sorted size, mounting the finger on a robot arm and digging through fine-grained sand and coarse-grained rice. Granular media can jam the finger when numerous particles become locked in place. Thus, scientists added vibration to the Digger Finger’s capabilities and put it through a battery of tests. Rapid vibrations helped “fluidize” the media, clearing jams and allowing for deeper burrowing — through this fluidizing effect was harder to achieve in the sand than in rice.
Radha Patel, a postdoc in MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), said, “We wanted to see how mechanical vibrations aid in digging deeper and getting through jams. We ran the vibrating motor at different operating voltages, which changes the amplitude and frequency of the vibrations.”
“Operators will have to adjust the Digger Finger’s motion pattern for different settings “depending on the type of media and the size and shape of the grains.”
Adelson says the Digger Finger is part of a program extending the domains in which robotic touch can be used. Humans use their fingers amidst complex environments, whether fishing for a key in a pants pocket or feeling for a tumor during surgery.
“As we get better at an artificial touch, we want to be able to use it in situations when all kinds of distracting information surround us. We want to be able to distinguish between the stuff that’s important and the stuff that’s not.”
Journal Reference:
- Radhen Patel et al. Digger Finger: GelSight Tactile Sensor for Object Identification Inside Granular Media. arXiv: 2102.10230v1