
Bioinspired underwater robots that can change their shapes dynamically push through the water much more efficiently than their conventional rigid counterparts. But they’re quite difficult to build.
Now, an MIT research team has come up with an innovative approach to creating deformable underwater robots. The modular system can be used to build robots of varying shapes and sizes with both hard and soft elements.
The deformable robots are made with lattice-like pieces, called voxels, that are low density and have high stiffness. The individual voxels are mostly hollow structures made up of cast plastic pieces with narrow struts in complex shapes. The box-like shapes are load-bearing in one direction but soft in others, an unusual combination achieved by blending stiff and flexible components in different proportions.
“Smooth flexibility of the body surface allows us to implement flow control that can reduce drag and improve propulsive efficiency, resulting in substantial fuel saving,” says Triantafyllou, who was part of MIT’s original RoboTuna team.
The team has demonstrated the new system in two different example configurations, one like an eel and the other a wing-like hydrofoil.
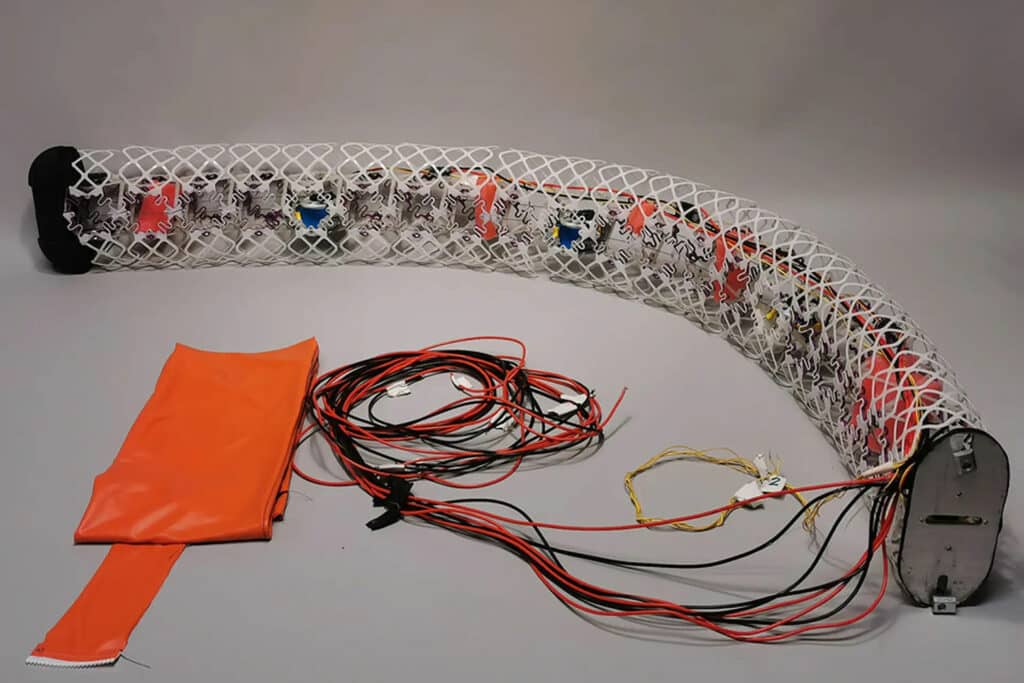
In one demonstration, they built a meter-long, snake-like structure made up of 20 voxels attached end-to-end in a long row. An actuator in the center can pull a wire attached to each of the two voxels on either side, contracting them and causing the structure to bend. The whole structure is covered with a rib-like supporting structure and then a tight-fitting waterproof neoprene skin.
An MIT tow tank test showed its efficiency in the water and demonstrated that it was indeed capable of generating forward thrust sufficient to propel itself forward using undulating motions.

Researchers state that a snake-like robot built by NASA was made of thousands of unique pieces, whereas this group’s snake is made up of only about 60 individual components. Also, compared to MIT RoboTuna, which took two years to design and build, this device was assembled in about two days.
The other they demonstrated is a wing-like shape, or hydrofoil, made up of an array of the same voxels but able to change its profile shape and therefore control the lift-to-drag ratio and other properties of the wing.
Ultimately, the concept might be applied to a whale-like submersible craft, using its morphable body shape to create propulsion. It could also be applied to parts of other vessels, such as racing yachts, where having a keel or a rudder that could curve gently during a turn instead of remaining straight could provide an extra edge.
Journal reference:
- Alfonso Parra Rubio, Dixia Fan, Benjamin Jenett, José del Águila Ferrandis, Filippos Tourlomousis, Amira Abdel-Rahman, David Preiss, Michael Triantafyllou, and Neil Gershenfeld. Modular Morphing Lattices for Large-Scale Underwater Continuum Robotic Structures. Soft Robotics, 2023; DOI: 10.1089/soro.2022.0117